
I wanted to give Cybot Sight, that is add a camera to Cybot.

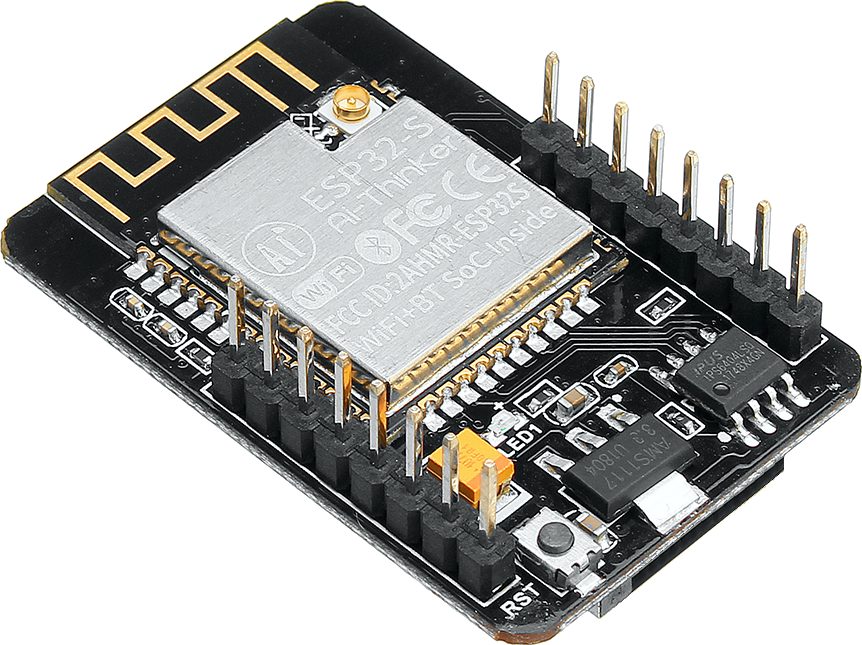
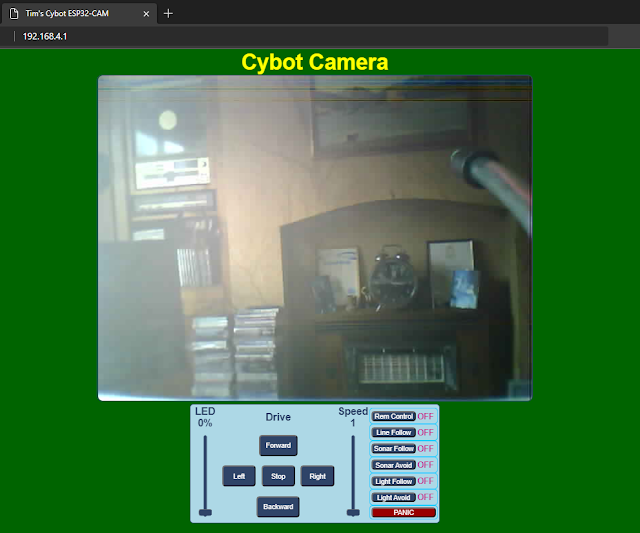
Using an ESP32-CAM module will also enable me to control Cybot from a web
browser.
To control Cybot with the ESP32-CAM module requires tapping into
the Two-Wire Communication Bus.
The Two-Wire protocol used by Cybot is
very similar to the I2C standard, but not quite the same.
So to use a
modified I2C protocol to talk to Cybot, I need to use an Arduino NANO to
translate the ESP32-CAM I2C protocol commands to the Cybot I2C protocol
commands.
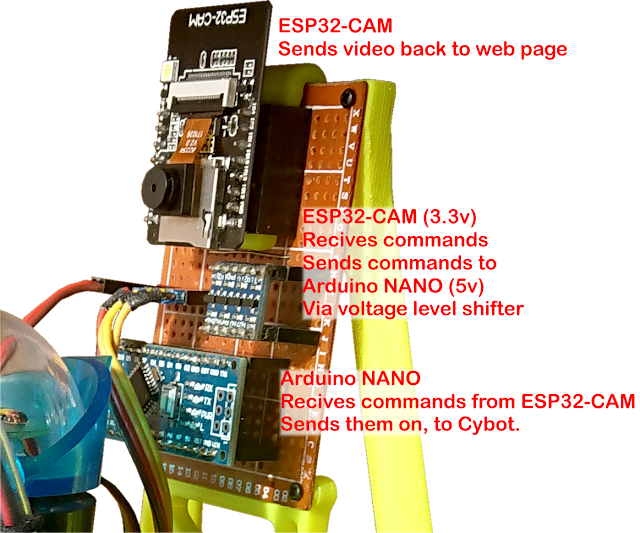
To mount all the components for the Camera Board, I used a cheap PY-5CM*7CM perforated board.


A logic level shifter is also needed.
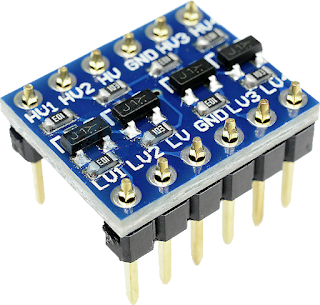
The ESP32-CAM has a 5v input, this goes to a 3.3v voltage regulator, which can
handle more than 5v input. This input is connected to the 6v side of the
battery supply of Cybot under the new power board.
So I have connected the ESP32-CAM here before any voltage drop at the battery
supply because the camera and Wi-Fi draws quite a bit of power. If the power
drops it can create a brownout.
The power for the Arduino NANO is taken from the header that stacks through
all the circuit boards.
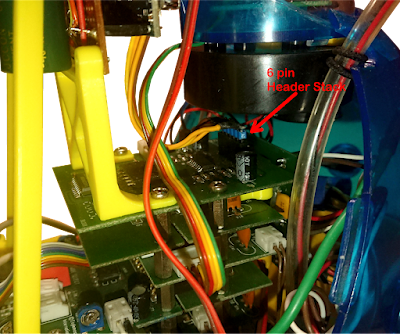
- Ground.
- 6 volt supply. (I haven't used this due to voltage drop)
- 5 volt supply.
- SCL. Two-Wire Clock.
- SDA. Two-Wire Data.
- Reset for Drive Microcontroller.
Made a cable to go from headers to the Camera Board.



Designed some support and printed them on my 3D printer.

Those that end with R in there name require a mirror image making to make a
left version.
I have done code for the ESP32-CAM and Arduino NANO.
They are all in this file: Pub_Cybot_ESP32CAM_Control.zip
There are three versions of HEX file for the NANO, no bootloader, old
bootloader and new bootloader.
I have added XLoader to install your choice.



































